






*个网口为TCP/IP通讯用,请注意不要混淆。
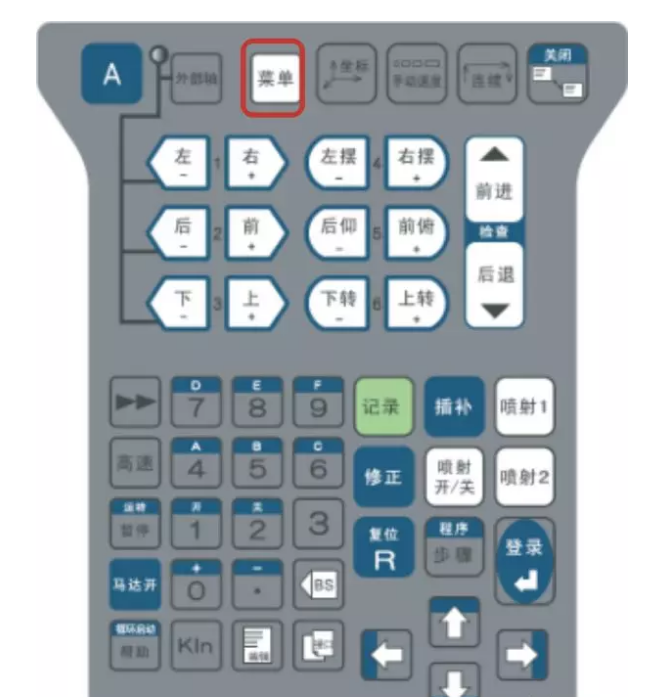
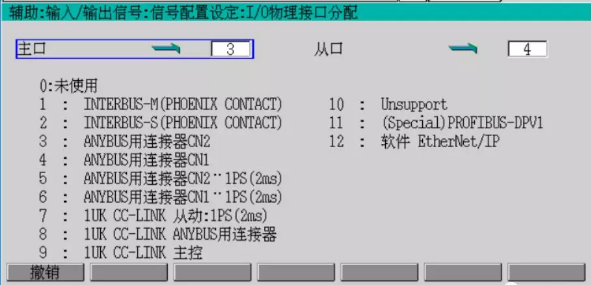
点击示教器键盘上的「菜单」按键,进入辅助功能=>6.输入/输出信号=>8.信号配置设定=>2.I/O物理接口分配菜单,填入IO物理接口分配。
在安装对应板卡的情况下,填入对应的端口号。
主口填入12,从口填入12。
不使用的情况下填0。
点击示教器键盘上的「菜单」按键,进入辅助功能=>6.输入/输出信号=>8.信号配置设定=>2.I/O物理接口分配菜单,填入IO物理接口分配。
在安装对应板卡的情况下,填入对应的端口号。
主口填入12,从口填入12。
不使用的情况下填0。
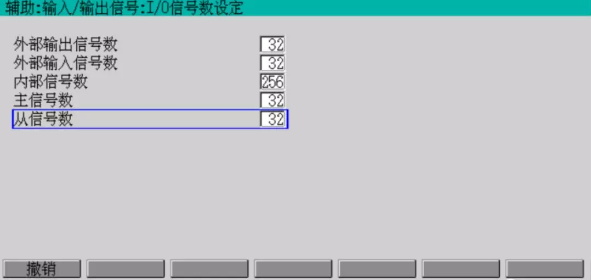
进入辅助=>6.输入/输出信号=>8.信号配置设定=>1.信号配置设定菜单
将AS应用信号号码按16点一组分配给IO接口中间缓冲器本地(LOCAL)从站(SLAVE)主站(MASTER)的方法进行登记。
以主从本地各32位为例如下图,按对应的位数来登记信号配置。
图中所示为本地设定32位信号,主站设置32位信号,从站设置32位信号。
设置主/从/本地站时从1开始计数。

主站设定需要其他特殊设定的总线部分EtherNet/IP主站
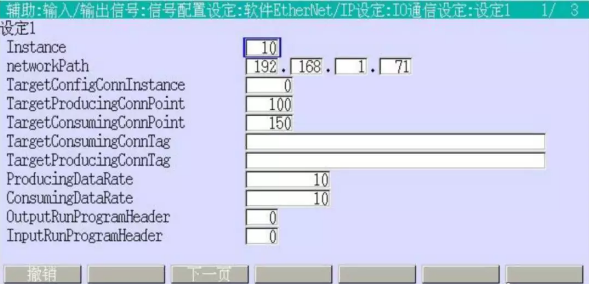
进入辅助=>6.输入/输出信号=>8.信号配置设定=>9.软件EtherNet/IP设定=>4.IO端口设定=>*.设定*菜单中
*多可设3台连接设备
根据设备提供的说明填写实例号,IP等前5项数据(不清楚数值可咨询设备厂商) 。
其余部分无特殊要求默认即可。
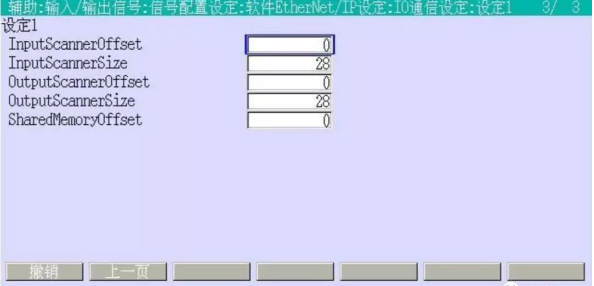
进入辅助=>6.输入/输出信号=>8.信号配置设定=>9.软件EtherNet/IP设定=>4.IO端口设定=>*.设定*菜单中
无特殊要求此页默认即可。

进入辅助=>6.输入/输出信号=>8.信号配置设定=>9.软件EtherNet/IP设定=>4.IO端口设定=>*.设定*菜单中
无特殊要求此页默认即可。
从站设定需要其他特殊设定的总线部分软件EtherNet/IP从站
进入辅助=>6.输入/输出信号=>8.信号配置设定=>9.软件EtherNet/IP设定=>1.端口设定菜单
如图菜单更改IP地址和子网掩码,网关。

从站设定需要其他特殊设定的总线部分软件EtherNet/IP从站
进入辅助=>6.输入/输出信号=>8.信号配置设定=>9.软件EtherNet/IP设定=>1.端口设定菜单
如图菜单更改IP地址和子网掩码,网关。
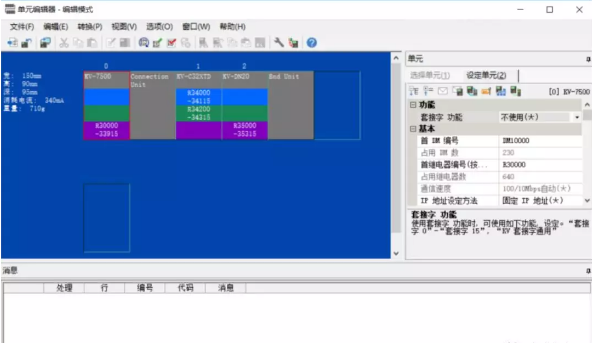
双击以太网模块进入单元编辑器
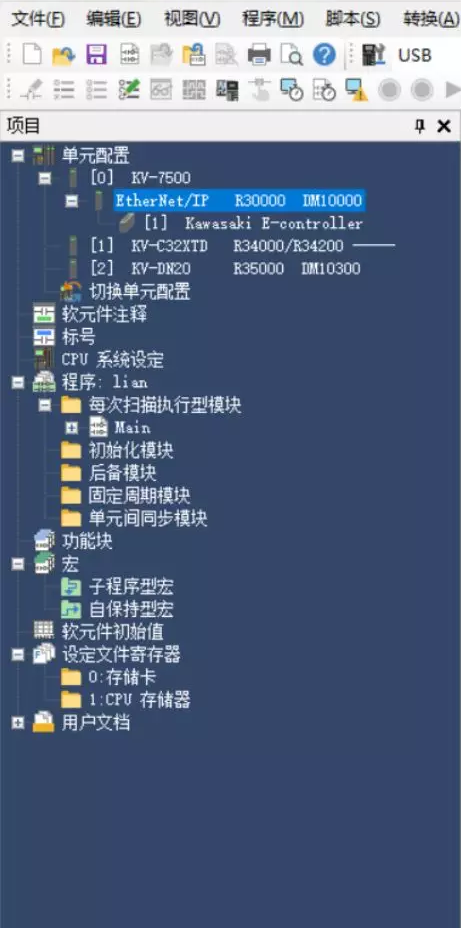
在单元控制器重右键点击EtherNet/IP设定
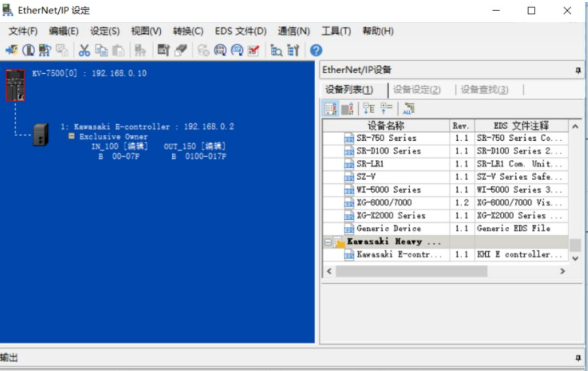
加载川崎随机光盘中提供的eds文件,选择并添加到画面中图中所示*下面一项为机器人eds文件。
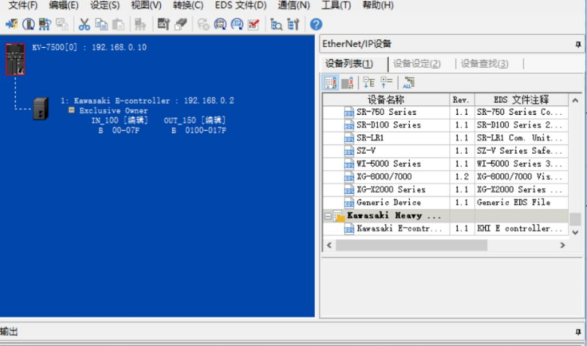
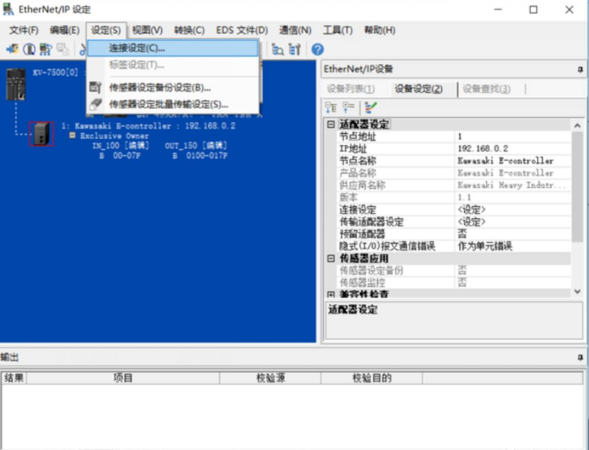
选中川崎模块更改IP地址
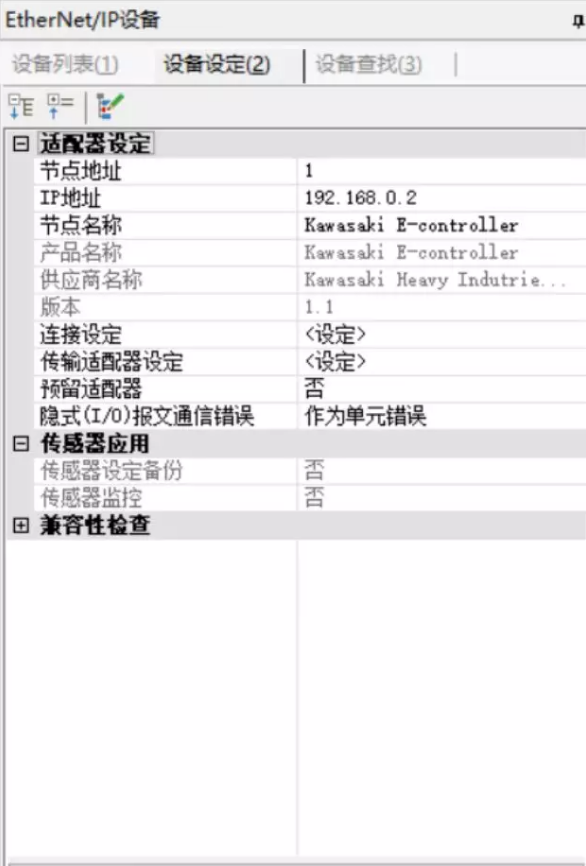
点击模块中编辑
分配IN/OUT的软元件的地址
图中所示设置是128位
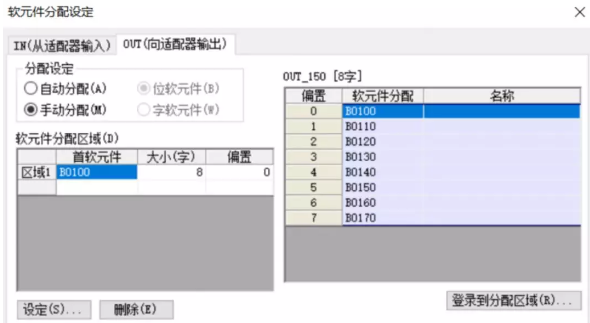
设定菜单点击连接设定
分配IN/OUT的软元件的地址
图中所示设置是128位

保存并下载到PLC中,当连通时EtherNet/IP单元没有出现红色叉号,机器人通讯成功。

素材来源于网络
更多川崎机器人

