






RA010N川崎弧焊机器人10公斤
简介:
机器人弧焊 RA010N机器人 熟练而灵活的弧焊机器人 从导入川崎弧焊机器人之日起,就可以媲美一个熟练焊接工人的焊接品质。 RA010N 概述: 负载 10 kg 轴数 6 伸展距离 1,450 mm 重复性 0.05...
联系电话:18616728999(微信同号) 刘经理
机器人弧焊
RA010N机器人
熟练而灵活的弧焊机器人
从导入川崎弧焊机器人之日起,就可以媲美一个熟练焊接工人的焊接品质。
提高产量与质量
弧焊是一种使用大电流来熔化和熔合可消耗金属到基体金属上的接合工艺。弧焊及其他的相关工艺广泛用于交通运输、建筑和工业设备制造领域。在过去的四十多年中,川崎已经研发出了新的金属制造工艺,使得弧焊技术、工艺和质量都得到了改善。
川崎提供的标准接口可以与任何主要*的焊接电源适配。自适应激光视觉系统可用于查看焊接电极前面的接合情况,以便在焊接之前和焊接期间确定并实时跟踪接合处的几何形状。川崎还提供启动传感和可触传感来确定焊缝的正确位置。多道自适应填充技术适用于重沉积焊接应用。
川崎的先进技术可以帮助您达到您期望的弧焊系统能达到的产品质量和产量。

川崎提供的标准接口可以与任何主要*的焊接电源适配。自适应激光视觉系统可用于查看焊接电极前面的接合情况,以便在焊接之前和焊接期间确定并实时跟踪接合处的几何形状。川崎还提供启动传感和可触传感来确定焊缝的正确位置。多道自适应填充技术适用于重沉积焊接应用。
川崎的先进技术可以帮助您达到您期望的弧焊系统能达到的产品质量和产量。
弧焊机器人:
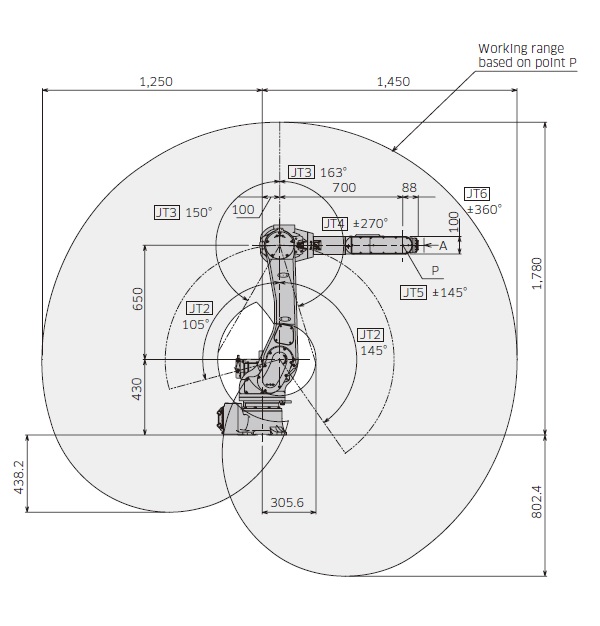
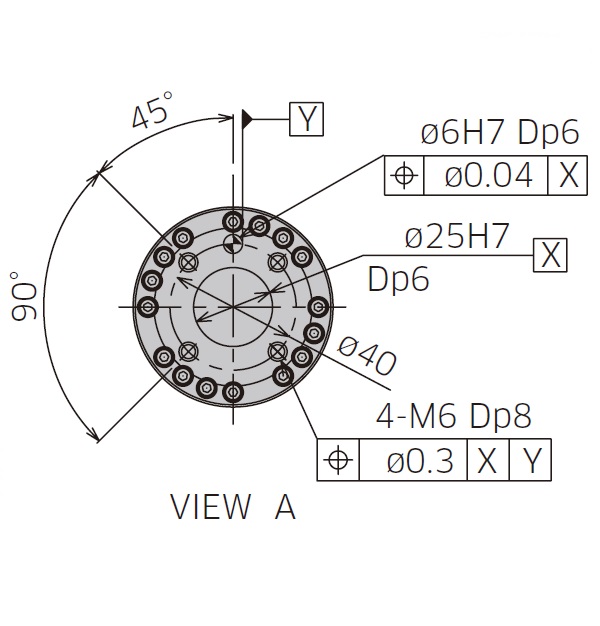
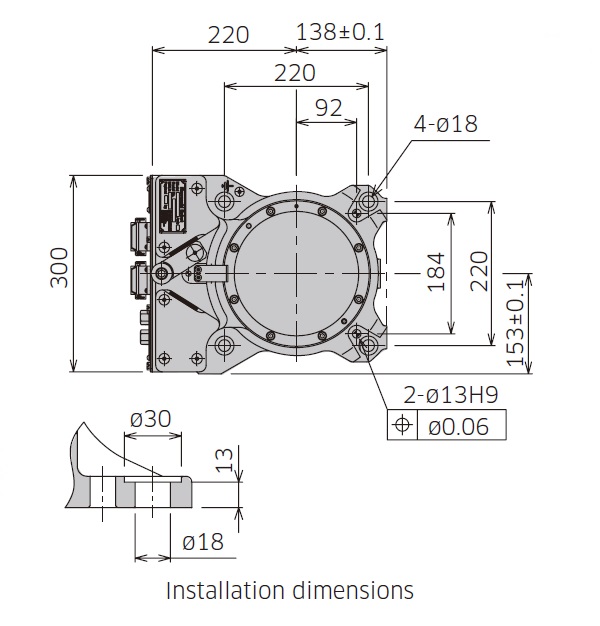
运动范围与尺寸
点击下面的图片来查看。图中所示尺寸单位为毫米(mm)。
RA010N的规格
| RA010N的规格 | |||
| 类型 | 多关节型机器人 | ||
|---|---|---|---|
| 自由度 | 6 | ||
| *大负载 (kg) | 10 | ||
| *大伸展距离 (mm) | 1,450 | ||
| 位置重复性 (mm) ✽1 | ±0.05 | ||
| 运动范围 (°) | 手臂旋转 (JT1) | ±180 | |
| 手臂前后 (JT2) | +145 - −105 | ||
| 手臂上下 (JT3) | +150 - −163 | ||
| 手腕旋转 (JT4) | ±270 | ||
| 手腕弯曲 (JT5) | ±145 | ||
| 手腕扭转 (JT6) | ±360 | ||
| *大速度 (°/s) | 手臂旋转 (JT1) | 250 | |
| 手臂前后 (JT2) | 250 | ||
| 手臂上下 (JT3) | 215 | ||
| 手腕旋转 (JT4) | 365 | ||
| 手腕弯曲 (JT5) | 380 | ||
| 手腕扭转 (JT6) | 700 | ||
| 惯量 (N•m) | 手腕旋转 (JT4) | 22 | |
| 手腕弯曲 (JT5) | 22 | ||
| 手腕扭转 (JT6) | 10 | ||
| 惯性力矩 (kg•m2) | 手腕旋转 (JT4) | 0.7 | |
| 手腕弯曲 (JT5) | 0.7 | ||
| 手腕扭转 (JT6) | 0.2 | ||
| 质量 (kg) | 150 | ||
| 机身颜色 | 孟塞尔10GY9/1当量 | ||
| 安装 | 地面, 悬挂 | ||
| 环境条件 | 环境温度(°C) | 0 - 45 | |
| 相对湿度(%) | 35 - 85 (无结露) | ||
| 电源要量 (kVA) ✽2 | 2.0 | ||
| 保护等级 | IP65 | ||
| 控制柜 | 型号 面向北美 | E01 | |
| 型号 面向欧洲 | |||
| 型号 面向日本 & 亚洲 | |||
✽1: 以ISO9283为基准。
✽2: 因负载重量及动作而不同。

